Š¦Č▄Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮy╣żū„įŁ└Ēų«Č■
łD3 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮyöĄō■š¹ą╬ļŖ┬Ę, ▓╔ė├┴∙Ę┤ŽÓŲ„╝»│╔ļŖ┬ĘCD4069, š¹ą╬║¾Ą─öĄō■ė╔(8) ─_▌ö│÷ĪŻ

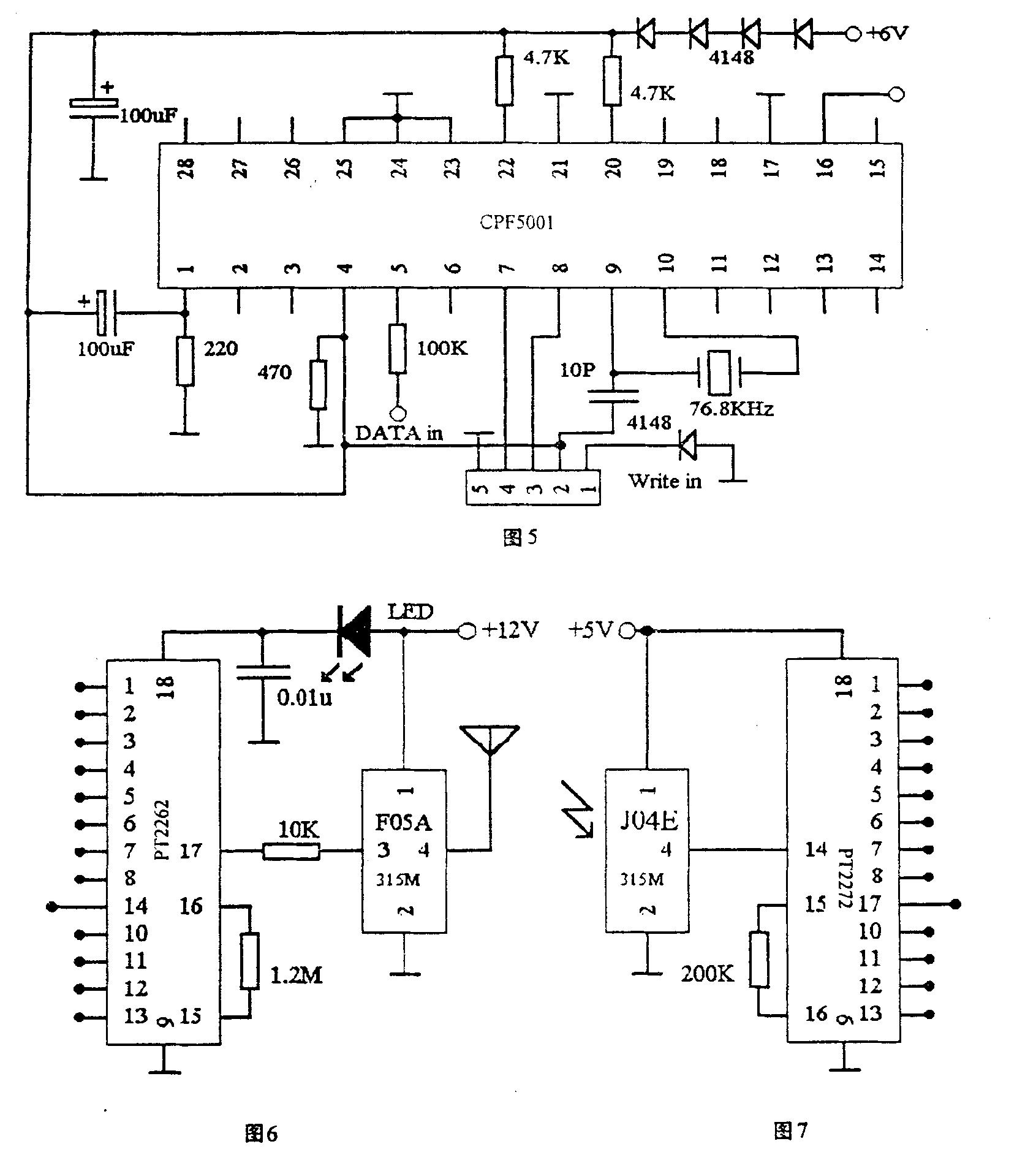
łD4 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮyĮŌ┤aļŖ┬Ę, ▓╔ė├PH IL IPS ╣½╦Š╔·«aĄ─POCSA G ┤aĮŌ┤aīŻė├ąŠŲ¼CPF5001. (1) ─_╩ŪÅ═╬╗Č╦, (9)Īó(10) ─_ĮėĢrńŖŠ¦¾w, (7)Īó(8) ─_╩ŪöĄō■▌ö╚ļĪó▌ö│÷Č╦(┐╔īóĄžųĘ┤a║═Ųõ╦¹ą┼Žóīæ╚ļŲ¼ā╚EEPROM ) ųą, (5) ─_╩Ūš¹ą╬║¾Ą─├}ø_öĄō■▌ö╚ļČ╦, (16) ─_╩Ū▌ö│÷Č╦, ╚ńĮŌ┤a│╔╣”įō─_▌ö│÷Ė▀ļŖŲĮĪŻ
łD5 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮyėŗĢrŲ„ļŖ┬Ę, ė╔14 ĘųŅlŲ„CD4060 śŗ│╔, š{╣ØŲõ(9)Īó(10) ─_Ą─CĪóR ųĄ┐╔Ė─ūāŲõā╚▓┐Ą─ĢrńŖŅl┬╩, Å─Č°š{╣ØČ©ĢrĢrķgķLČ╠, (12) ─_×ķÅ═╬╗Č╦, (16) ─_╩Ūš²ļŖį┤, «öCPF5001 Ą─(16) ─_▌ö│÷Ė▀ļŖŲĮĢrQ 1ĪóQ 2 ī¦═©, CD4060 Ą├ļŖ╣żū„, ═¼ĢrQ 3 ī¦═©J 1 ╬³║Ž, ▀Mąą┬ĢĪó╣Ōł¾Š». «öėŗĢrŲ„ĄĮĢr║¾(3) ─_▌ö│÷Ė▀ļŖŲĮQ 4 ī¦═©, Ų¹▄ćļŖį┤└^ļŖŲ„äėū„, š¹▄ćöÓļŖ.łD6, łD7 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮy¤oŠĆ▀b┐žļŖ┬Ę, ┐╔ė├ė┌¤oŠĆ▀b┐žµi▄ćĪóĮŌµi║═īż▄ćĄ╚. ā╔ļŖ┬ĘŠ∙▓╔ė├╔õŅl╩š░l─ŻēKĪŻłD6 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮy░l╔õļŖ┬Ę, ŲõųąPT - 2262 ╩ŪŠÄ┤aąŠŲ¼, (1) Ī¬(8) ─_╩ŪĄžųĘČ╦, (10) Ī¬(13) ─_╩ŪöĄō■Č╦,( 14) ─_╩Ū┐žųŲČ╦, (15)Īó(18) ─_═ŌĮėĢrńŖļŖūĶ, (17) ─_×ķą┼╠¢▌ö│÷Č╦. F05A ╩Ū░l╔õ─ŻēK, ╦³▓╔ė├┬Ģ▒ĒųCš±ĘĆŅl, Ņl┬╩ę╗ų┬ąį▌^║├Ūę╣żū„ĘĆČ©. łD7 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮyĮė╩šļŖ┬ĘJ 04E ╩ŪĮė╩š─ŻēK, ╦³▓╔ė├│¼═Ō▓ŅĪóČ■┤╬ūāŅlĮYśŗ, ╦∙ėąĄ─╔õŅlĮė╩šĪó╗ņŅlĪó×V▓©ĪóöĄō■ĮŌš{ĪóĘ┼┤¾š¹ą╬╚½▓┐į┌Ųõā╚▓┐═Ļ│╔. PT - 2272 ╩Ū┼cPT - 2262 ┼õ║Ž╩╣ė├Ą─ĮŌ┤aąŠŲ¼, Ųõ(1) - (8) ─_×ķĄžųĘČ╦, (17) ─_×ķĮŌ┤aėąą¦ųĖ╩ŠČ╦Īó(15)Īó(16) ─_×ķ═ŌĮėĢrńŖļŖūĶČ╦, (10) - (13) ─_×ķöĄō■▌ö│÷Č╦, ╚ńĮŌ┤aėąą¦ŲõŽÓæ¬Č╦▌ö│÷Ė▀ļŖŲĮĪŻ
łD8 ╩Ū▀h│╠Ų¹▄ćĘ└▒Ił¾Š»ŽĄĮyP IC16C57- RCöP śŗ│╔Ą─ųąčļ╠Ä└ĒŲ„, Ųõ(6) ─_×ķšäėé„ĖąŲ„ą┼╠¢▌ö╚ļČ╦, (7) ─_×ķķT▀ģė|░lą┼╠¢▌ö╚ļČ╦, (22) Ī¬(25) ─_×ķ▀b┐žöĄō■▌ö╚ļČ╦, (28) ─_×ķÅ═╬╗Č╦. ųąčļ╠Ä└ĒŲ„īó▀b┐žą┼╠¢║═šäėé„ĖąŲ„ęį╝░ķT▀ģķ_ĻPĄ─ą┼╠¢▀MąąĀŅæBūRäe║¾, ė╔(13) - (18)Īó(20) ─_▌ö│÷ŽÓæ¬Ą─┐žųŲą┼╠¢, ĮøTDG2003A P “īäė║¾(“īäėļŖ┬Ę╚ńłD9) ┐žųŲĖ„ĘN╣”─▄└^ļŖŲ„═Ļ│╔ųą┐žµiĄ─┐žųŲ║═┬ĢĪó╣Ōł¾Š»ŽĄĮy╝░Ų¹▄ćļŖį┤Ą─┐žųŲĪŻ


